

Introduction


"A containership on your two o'clock; are you happy to overfly?". The Air Controller in the command centre of the frigate sees on his radar screen that the helicopter is about to cross the route of a container ship and asks the helicopter pilot for approval. "Negative" is the pilot's answer. Although its altitude is high enough, turbulence caused by the ship's exhaust pipes may endanger the helicopter. With the instruction "vector port 1-6-0, height 400, speed 120" the Air Controller directs the helicopter away from the container ship.
Task and training of the Air Controller
Once the helicopter is airborne, the Air-Controller gives its navigation instructions to the pilot by radio, ensuring that the mission is carried out in accordance with tactical requirements, and that the helicopter returns on deck safely. The Air Controller has a responsible task, imposing high demands on insight, concentration and communication skills.
The Operational School of the Royal Netherlands Navy uses a simulator when training Air Controllers (see Figure).
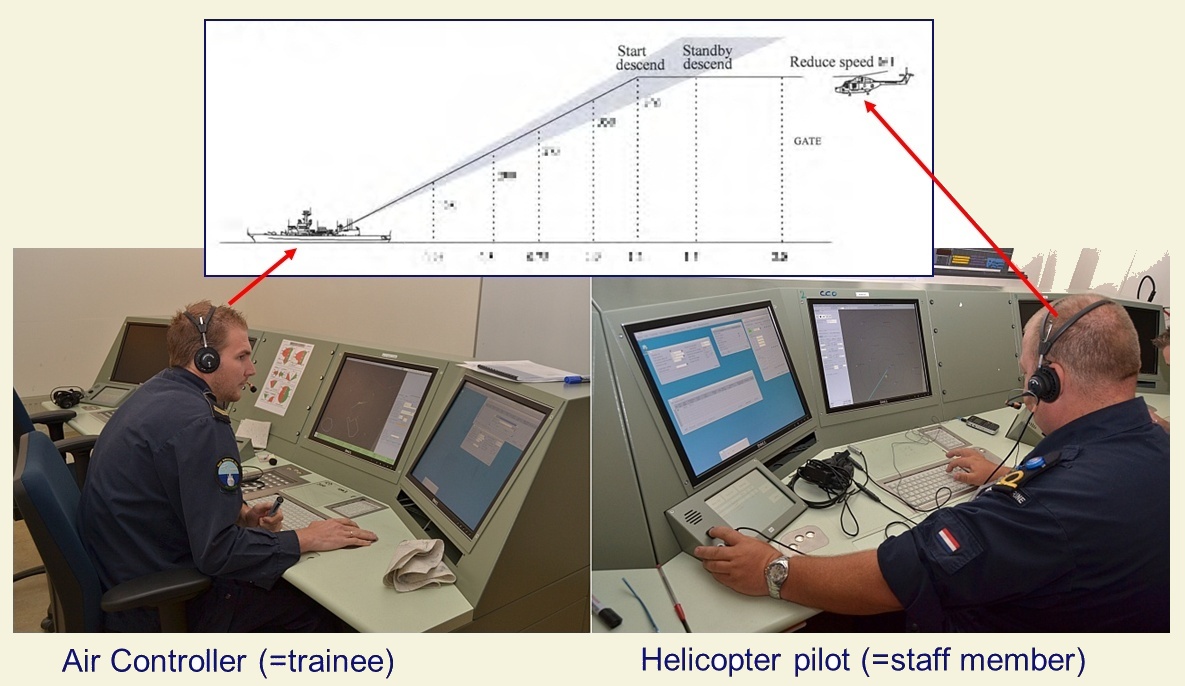
The instructor selects or makes a scenario and starts the simulation. The trainee-AC (left) gives his directions to the helicopter pilot (right), played by a staff member of the school.
Project
In this project, TNO investigates how to develop an intelligent agent that is capable of autonomously assuming the role of helicopter pilot. Behavior and speech models are being developed to create a virtual pilot that communicates with the air controller by natural speech and that responds accurately to instructions. A virtual pilot can make the training program more flexible, more effective and cheaper.
Results
TNO completed the first phase of the project in September 2012 by demonstrating a "stand alone" version of the virtual pilot. Expert air controllers from the navy were able to successfully perform a series of "ship controlled approach" missions. In the next project phase the task and speech models of the virtual pilot were expanded, speech recognition accuracy was further improved and didactical functions were added to the system. The final version of the Virtual Pilot demonstrator was completed at the beginning of 2014.
Team
TNO
Royal Netherlands Navy
Karel van den Bosch
Judith Kessens
Rudy Boonekamp
Annerieke Heuvelink
Tijmen Muller
KLTZ J.J. Teertstra
AOO ODOPS Jos Koning
Adj. Marcel van den Beld
Project Term
Start
Completion
August 2011
February 2014
Publications
Strijbosch, V. (2014a). Virtuele Piloot bijna werkelijkheid (in Dutch). In: Alle Hens, februari 2014 (pp. 10-11). [pdf]
Strijbosch, V. (2014b). Virtuele Piloot implementeren (in Dutch). In: Materieel Gezien, februari 2014. [pdf] [HTML]
Bosch, K. van den, & Boonekamp, R. (2013). Virtual Pilot: agent-based simulation for effective training. In: Proceedings of the NATO MSG Symposium on Advanced Technologies for Military Training, October 9-11, LaSpezia, Italy. [pdf]
Maas, M. van der (2012). Virtual Pilot: vlieger van bits and bytes (in Dutch). In: Alle Hens, oktober 2012 (pp. 18-19). [pdf]
Poster Virtual Pilot. [pdf]
Clips
Trailer-version of Documentary clip(1'44")
Documentary clip (8'59")
Demonstration of a training session with Virtual Pilot (7'13")
Photo's





