

Inleiding


"A containership on your two o'clock; are you happy to overfly?". De Air Controller in de commando-centrale van het fregat ziet op zijn beeldscherm dat de helikopter een containerschip op zijn route heeft en vraagt aan de piloot of dat akkoord is. "Negative" antwoordt de vlieger, want hoewel hij hoog genoeg vliegt om over het schip heen te gaan, kan turbulentie veroorzaakt door de uitlaatpijpen de helikopter in gevaar brengen. Met de instructie "vector port 1-6-0, height 400, speed 120" leidt de Air Controller de helikopter weg van het containerschip.
Taak en training van de Air Controller
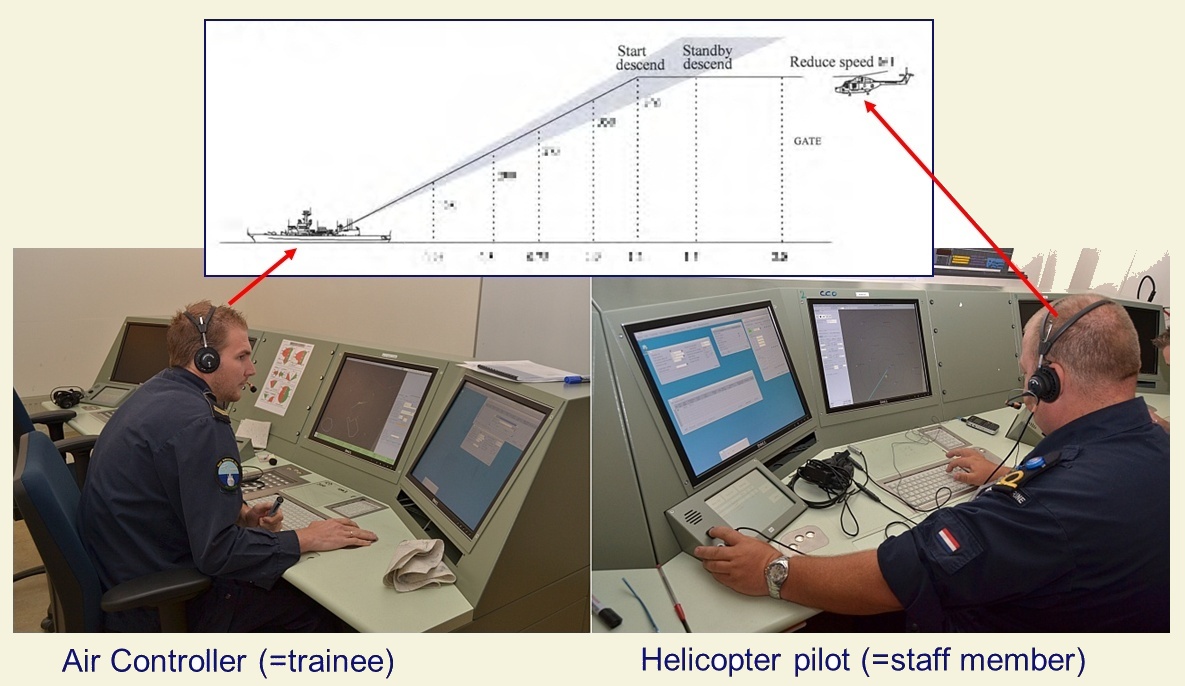
Als de helikopter airborne is, geeft de Air Controller via een radioverbinding navigatie-aanwijzingen aan de helikopter-vlieger. Daarmee zorgt de Air Controller ervoor dat de missie wordt uitgevoerd volgens de tactische eisen, en dat de helikopter op een gecontroleerde en veilige manier terugkeert aan dek. De Air Controller heeft een verantwoordelijke taak die hoge eisen stelt aan inzicht, concentratie en communicatievaardigheden.
De Operationele School verzorgt de opleiding tot Air Controller. Zij maakt daarbij gebruik van een trainingsimulator (zie Figuur). De instructeur kiest of maakt een scenario en start de simulatie. De Air Controller reageert op de gebeurtenissen en geeft aanwijzingen aan de helikoptervlieger, gespeeld door een staflid van de school.
Project
TNO onderzoekt of met gedrags- en spraakmodellen een virtuele piloot ontwikkeld kan worden: een software-piloot die -net als in het echt- via spraak communiceert met de Air Controller en die automatisch en correct reageert op de instructies. Oefenen met een virtuele piloot kan het trainingsprogramma van een Air Controller flexibeler, effectiever en goedkoper maken.
Resultaten
Eind september 2012 is de eerste fase van de Virtuele Piloot gedemonstreerd op de Operationele School van de marine. Experts van de marine konden met de Virtuele Piloot verschillende runs van een Ship Controlled Approach succesvol uitvoeren.
In de tweede fase is de taakkennis en intelligentie van de Virtuele Piloot verder uitgebreid, is de spraakherkenning verder verbeterd, en zijn er didactische functies toegevoegd. De defintieve versie van de Virtual Pilot demonstrator is begin 2014 opgeleverd.
Team
TNO
Koninklijke Marine
Karel van den Bosch
Judith Kessens
Rudy Boonekamp
Annerieke Heuvelink
Tijmen Muller
KLTZ J.J. Teertstra
AOO ODOPS Jos Koning
Adj. Marcel van den Beld
Looptijd Project
Start
Voltooiing
Augustus 2011
Februari 2014
Publicaties
Strijbosch, V. (2014a). Virtuele Piloot bijna werkelijkheid. In: Alle Hens, februari 2014 (pp. 10-11). [pdf]
Strijbosch, V. (2014b). Virtuele Piloot implementeren (in Dutch). In: Materieel Gezien, februari 2014. [pdf] [HTML]
Bosch, K. van den, & Boonekamp, R. (2013). Virtual Pilot: agent-based simulation for effective training. In: Proceedings of the NATO MSG Symposium on Advanced Technologies for Military Training, October 9-11, LaSpezia, Italy. [pdf]
Maas, M. van der (2012). Virtual Pilot: vlieger van bits and bytes. In: Alle Hens, oktober 2012 (pp. 18-19). [pdf]
Poster Virtual Pilot. [pdf]
Clips
Trailer-versie (1'44")
Mini-documentaire (8'59")
Demonstratie van een trainingssessie met Virtual Pilot (7'15")
Foto's





